What does "required" really mean?
The pilot requires the following information from the visual aids if he is to adequately ‘close the loop’ and provide proper control over the aircraft during an approach:
1. current position, i.e. aircraft displacement relative to centre-line and glide-slope, and distance to go to the threshold.
2. flight path, i.e. instantaneous direction of travel or trajectory.
This need is encapsulated in the definition of the Required Visual Reference at Decision Height: "that section of the visual aids or of the approach area which should have been in view for sufficient time for the pilot to have made an assessment of the aircraft position and rate of change of position, in relation to the desired flight path."
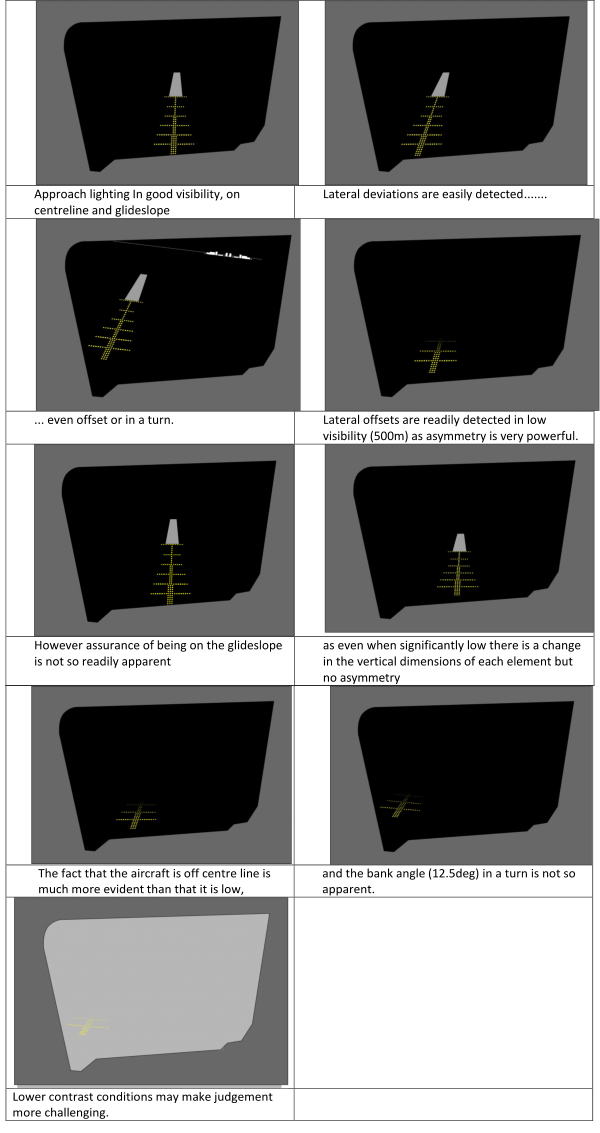
The "current position" requirement can be satisfied by observing the shape of what is available of the visual aids and runway markings, using their perspective image. The following shows the runway and Calvert 5 bar approach lighting system as seen from an aircraft on a 3 deg. approach at 400 ft. The crossbars are so arranged that their outer edges are contained by two straight lines which intersect at the aiming point.
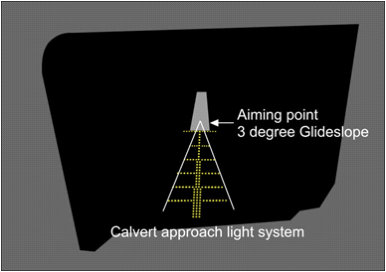
The significance of this is that the perspective angle of the lights will remain constant so long as the aircraft maintains an approach path which will take it to the aiming point , although it is doubtful that the human eye is capable of detecting subtle changes of this angle. However, the apparent angle between the centre-line and the crossbars is very sensitive to lateral position, and the Calvert pattern provides excellent azimuth guidance. Other approach light systems provide good azimuth guidance but less vertical path information as they do not "point to" the desired approach aiming point in the same way.
The decision-making process is affected by the pilot's overall workload. As might be expected, a pilot who is simultaneously flying the aircraft takes measurably longer to make an assessment and reach a decision than one who can devote his attention to the developing visual cues.
During any late adjustment of approach path the changes of shape will be complex and increased workload due to lateral manoeuvring will degrade the vertical control of the aircraft. This effect can be sufficiently severe to make the vertical control loop ‘open’, i.e. there is little or no feedback of visual information about what is happening in pitch and therefore the aircraft could pick up a large rate of descent, for instance, without the pilot realising it. Hence a stable and accurate approach ensuring accurate azimuth control without recourse to S-turns, is always desirable, especially when operating in conditions close to or below Cat. 1.
These problems are compounded when the aiming point is not in view. Even when there is no need for lateral adjustment, other elements of the lighting pattern must enable the pilot to judge the flight path. The vertical position at DH can be correct even if the aircraft is on a dangerous trajectory.
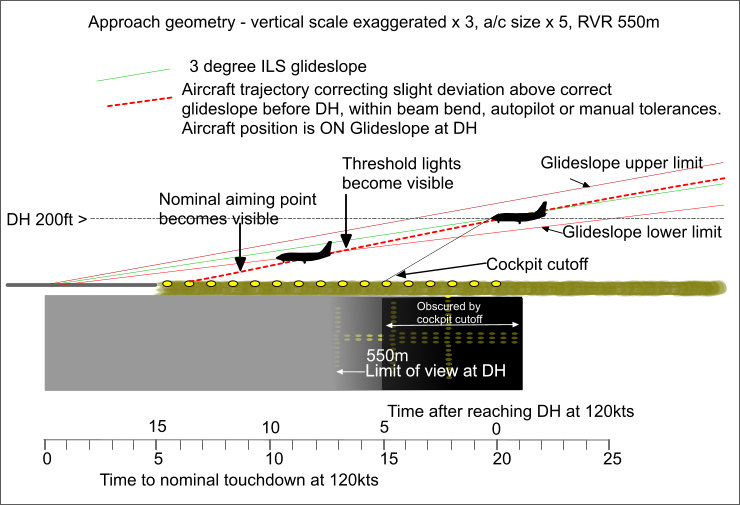
This issue is usually illustrated with images which tend to understate the problem, like the one above, which exaggerates the vertical dimensions and angles by a factor of 3. The timescale in these illustrations is also based on a groundspeed of 120kts, which gives over-generous results for most large jet transports but is perhaps appropriate for some of the smaller types which are not so well equipped with advanced avionics.
In the more accurately scaled image below, the aircraft at DH is ON the glideslope, after correcting for a small deviation above it which is well within normal tolerances. So it is on a slightly steeper than ideal path at this point. In a homogenous fog with 550M RVR, contact will probably have been about 6 seconds earlier, and the furthest approach light visible may be about the third crossbar.
The pilot's problem is to recognise that while the position is spot-on, the trajectory is not. The aircraft should actually CHANGE trajectory at this point to remain on the glideslope, which would happen if it were able to remain coupled to it by the autopilot - but that will probably not be permissible due to either autopilot or ILS limitations (or both).
But if the autopilot is disconnected as the pilot makes a decision to land, and the aircraft continues on this path, it will be significantly below the glideslope after a few seconds. However recognition of this fact will be very difficult from the visual cues alone.
Although not exactly the same situation, the sequence of events when an over-sensitive autopilot caused glideslope deviations close to Decision Height during a Cat 2 approach in a B727 in 1998 illustrates these human limitations well. It is described in an excellent recent textbook.
A "Full fly up" G/S signal would be received (if it were reliable) after about 7 seconds, just about the time the threshold lights come into view, but the aircraft would be almost into the approach lights before the nominal aiming point is visible. It is this inability to detect and correct vertical deviations quickly enough in limited visual cues that has been the cause of many non-Cat. 2 and 3 low visibility landing accidents.
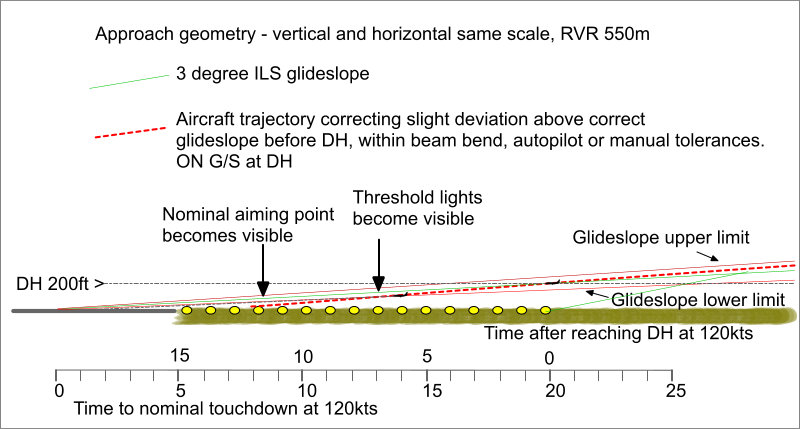
So the very small vertical angle changes can be appreciated better in this version of the same geometry where vertical and horizontal scale(and a representative aircraft) are to the same scale.
Other visibility-limiting problems.
Although this section has concentrated mainly on fog, other significant weather obscuration cannot be ignored. In 2013 an B737 crashed into the approach lights in Bali after the pilot had seen a light but then lost the ability to to control the aircraft on flying through heavy rain. Although many other factors were involved, in this respect there was a very similar sequence of events to that in an Australian DC9 accident as long ago as 1978. In that case the accident report noted that "research conclusions describe three effects of rain on windscreens.
- Firstly, a blurring of vision.
- Secondly, a prismatic refraction by the water pooling on the windscreen, in a thicker layer at the top as the result of wind effect. This causes an apparent downwards displacement of objects.
- Finally, a light dispersion that causes perception of the visible horizon to appear as gradient blur.
The last two effects act in the same direction and cause the "horizon" to appear depressed as much as 1:12. This tends to cause a pilot to believe that he is higher than he is, and therefore descend the aircraft too low." It also noted that in that event the crew had not carried out a Pilot Monitored Approach (PicMA), as was required by company policy for the conditions they were in.
From all the research and accident and incident analysis, a number of clear themes emerge.
• The only completely reliable information available to the crew down to DH is from some of the instruments.
• Visual judgment of flight path from the cues available in minimum permitted visibility is a very demanding task
• Correcting vertical flight path errors using limited visual cues is extremely challenging
• The temptation to move from reliable instrument reference to less reliable visual cues is extremely strong and needs to be resisted.