"The good old days".
Before the introduction of autoland systems in the late 1960s, the majority of approaches were flown by hand. Due to limitations of the auto-pilots used and insufficient modes of operation, it was generally considered easier to fly the aircraft manually than to use the autopilot. Nevertheless, the advantages of coupling the aircraft automatically to the ILS localiser and glideslope as a means of reducing the pilot workload and increasing the accuracy of the operation was realised.
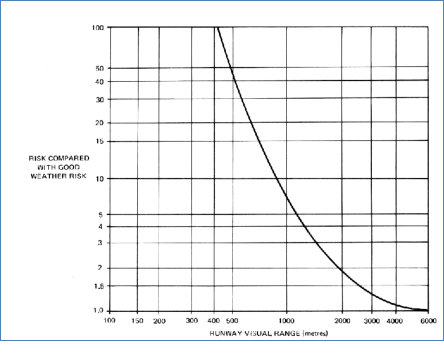
At least the last 200 ft of the approach, the flare, and the landing still had to be accomplished manually. In order that this could be achieved without undue risk, at that time leading authorities imposed a minimum RVR of 400m. on the approach. It was calculated that the risk during a manual approach and landing in poor weather conditions, expressed as a multiple of the risk in completely clear conditions, starts to increase at a visual range of about three miles and increases to 100 times greater in an RVR of 400m.
This graph was derived from world-wide accident statistics for transport aircraft operations to decision heights of about 200 ft. It indicates the dangers inherent in manually controlling aircraft in poor visual conditions from 200 ft., e.g. in 1000m RVR the risk is approximately 7 times greater than in CAVOK.
Vertical control is the hard part.
Research indicated that the prime cause of this increased risk in poor visibility was the problem of pitch control. Although fundamental elements of workload distribution and cross-checking were addressed from the very first evaluations, the initial impetus for research into crew coordination procedures was the need for better regularity and enhanced safety in poor visibility.
In the late 1940s extensive research into visual transition issues took place in Europe and the USA, prior to presentation to ICAO in1949. In the UK, the Blind Landing Experimental Unit, Bedford had developed the "Calvert" approach light system, which provided additional guidance compared to the systems being developed in the USA. During trials it was found that "at the higher approach speeds associated with the new jet aircraft, every pilot on looking up from the instrument panel to the approach lights began to sink immediately below the glide path and became dangerously low before becoming aware of it."
Although the Calvert system provided more guidance than the other systems, it was still inadequate for vertical guidance, particularly when the pilot was trying to adjust his visual focus while at the same time adapting to different cues. It was evident that azimuth accuracy was good, and even during the transition from instrument to visual flying, adequate visual cues are available for accurate azimuth guidance.
Pitch guidance, however, becomes progressively worse as the approach continues due to the difficulty in correctly interpreting the poor visual cues available. It was found that pilot performance deteriorates rapidly on first contact with the lighting pattern and only starts to improve when the aiming point comes into view. The aiming point is of course typically 300m beyond the runway threshold.