The sequence of visual cues
Knowing the visual characteristics associated with particular fog types can alert the pilot to the visual sequence he will see during the early stages of the approach. If it is possible to see the ground during the approach, it will generally be possible to identify the type of fog (e.g. shallow fog on the surface) and get some idea of its depth. If the ground is not visible due to a layer of low cloud or a night approach over water or unlit terrain, this will not be possible.
Dense and lifted fogs yield similar visual sequences to approaching into a fog where the ground beneath does not become visible in advance of the approach lights. In that case, once visual contact has been made the visual segment increases, as it does when the approach is made through low cloud. In the most extreme case of course a lifted fog becomes a well defined cloud-base with good visibility underneath, and determining whether sufficient visual cues exist approaching and at DH is a simple "Yes or No" affair.
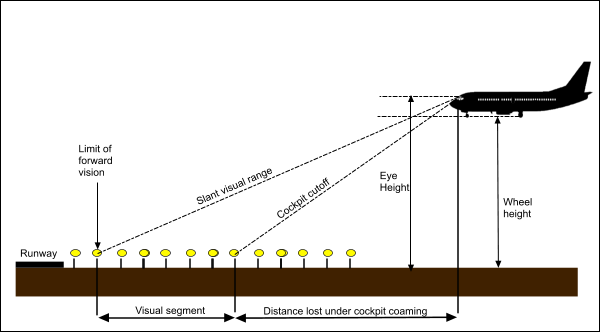
The visual segment will always be less than the limit of visibility because of the aircraft geometry, and of course the pilot's eyes will always be higher than the "aircraft" height for purposes of determining when DH is reached, because that is based on the wheel height. The effect of all the factors involved is always to make the pilot's task more difficult by reducing what he might have expected to see.
The "Normal" visual sequence.
As shown above, what pilots typically expect to see during an IMC approach is a constantly increasing visual segment. This will occur in a homogeneous fog or other "bad weather" which is of a fairly consistent nature in its air mass.
On the other hand, dangerous shallow fogs have a fundamentally different visual sequence to ragged cloud or general obscuration in rain or snow, as shown below. The limit to the pilot's forward vision is the optical path through a length of fog, equal to the SVR. So long as the aircraft is above the fog top, the angle of this path remains constant as height is decreased.
The effect of this is to reduce the visual segment as height decreases, due to the geometry of the situation. Some of the visual cues will become invisible as they are lost beneath the cockpit coaming structure. As soon as the aircraft is beneath the fog top, the angle will change, and increase the visual segment.
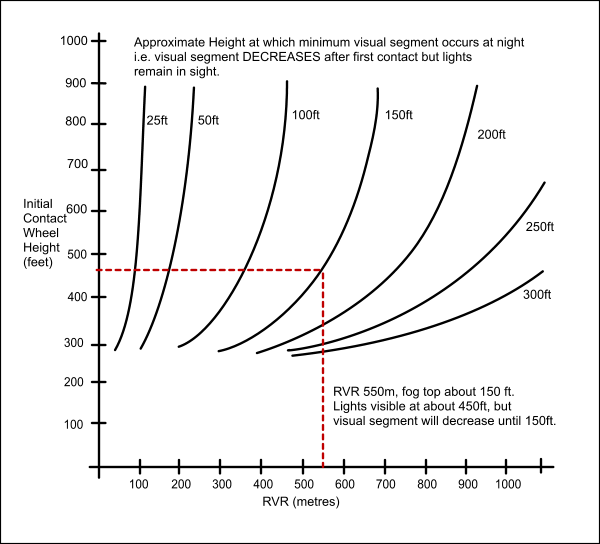
The following chart illustrates the characteristics of one particularly hazardous common type of fog, the shallow radiation fog often found at inland airports. The curves show the height at which the SVR changes cause the minimum amount of approach lighting to be visible after initial visual contact is achieved.
The red lines show the case of an approach being made in 550m/1800ft RVR. In this particular case it's assumed that visual contact happens to be achieved at 450 ft, about a mile out, as could easily occur with a shallow fog. As the aircraft nears the lights the SVR decreases as the pilot is increasingly looking down through more of the thicker part of the fog. In this case the fog is approximately 150 ft in depth and a minimum visual segment will be achieved at this height. In other words, the visual segment will initially reduce as the aircraft gets closer to the runway rather than expanding as you might expect.
While shallow fog is the usual cause of a decreasing visual segment under stable fog conditions, a similar effect can be experienced in a dense fog where the density is greatest near the surface. In this case as height reduces, the pilot is looking through fog of steadily increasing density and a reduction of visual segment may be experienced at quite a low height.
Other factors can also affect visual cue sequences. Since the furthest object in the visual segment is generally a light, variations in the brightness of adjacent parts of the lighting pattern can produce changes in visual segment. This is particularly noticeable where high intensity approach lighting is followed by less bright runway lighting. This effect is noticeable in the Cat 2/3 lighting pattern as an apparent ‘wall of fog’ at the threshold.
This is because the approach lights are brighter and hence visible at a much greater distance than the runway centreline/edge lights. So once the last approach lights have come into view, the pilot's limit of forward vision decreases until the relatively dim runway lights come into view. However this effect can be almost entirely overcome by changing the angles at which the runway light fittings are set, so that the centres of the beams are directed at the pilot when he most needs their guidance, and is incorporated on many Cat 2/3 lighting patterns.
Also after landing there may be an apparent reduction of segment after passing the TDZ lights. Although the centreline lights are just as bright as the TDZ lights, they are only in a single line and this decrease in the number of lights visible can appear to the pilot as a reduction in visual segment.
Why visual segment changes can be so dangerous.
Changes in visual segment have a marked effect on a pilot's visual judgement of flight path. A sudden decrease of segment means that the forward limit of visibility moves closer, and thus further down the windscreen. This is similar to the visual effect of an increase in pitch attitude, or the aircraft going above the correct flight path. Random and rapid changes of segment experienced in patchy fog can lead to confusion and disorientation.
In the worst case, where the aircraft is being controlled manually, this can cause the pilot instinctively to make a nose down input at very low altitude to regain a "correct" visual scene. This must then be very rapidly detected and corrected if ground impact short of the runway is to be avoided. The deviation is initiated by the pilot flying interpreting what is visible outside the aircraft, so the primary means of detecting it has to be something different, i.e. the instruments.
This is the reason why it's essential that the PNF continues to monitor the instruments and not the visual scene, otherwise he or she may be subjected to exactly the same illusions as the PF, and have no chance of detecting a deviation below the glideslope or increasing rate of descent. The scenario where both pilots were head-up, but with inadequate visual references is the source of many low visibility accidents.